
Google Maps Street View Extraktion
Erstellte ML-Pipelines zur globalen Extraktion von Straßennamen, Nummern und Verkehrszeichen mittels Erkennung, OCR und semantischer Segmentierung.
Ich bin ein angewandter Forschungswissenschaftler mit über 20 Jahren Erfahrung in den Bereichen Computer Vision, Deep Learning und ML-Systeme. Ich habe in der akademischen Welt und in der Industrie bei Google, Momenta, ENSCO und UMD gearbeitet und wirkungsvolle Lösungen von der Konzeption bis zur Bereitstellung geliefert.

Ich bin Dr. Xavier Gibert-Serra, ein Berater, der sich auf maschinelles Lernen und Computer Vision spezialisiert hat. Zuvor war ich Staff R&D Engineer bei Momenta Europe und arbeitete an der Wahrnehmung für autonomes Fahren, und Machine Learning Software Engineer bei Google Maps und Google X Robotics. Davor leitete ich bei ENSCO die R&D-Abteilung für Sichtsysteme zur Eisenbahninspektion. Ich habe meinen Ph.D. in Elektrotechnik und Computertechnik an der Universität von Maryland erworben, betreut von Rama Chellappa.
Mai 2023 – Jul 2025
Entwickelte, trainierte und implementierte Wahrnehmungsmodul-Updates für Kunden im Bereich autonomes Fahren in der EU und den USA. Fokus auf 3D-Objekterkennung, Multi-Sensor-Fusion, Tracking, Vorhersage und Data Mining.
Sep 2015 – Apr 2023
Google Maps: Entwarf große Vision-Pipelines zur Extraktion strukturierter Informationen aus Street View unter Verwendung von Objekterkennung, Segmentierung, OCR und Bündelausgleich.
X Robotics: Entwickelte Echtzeit-Pose-Schätzungs- und Tracking-Algorithmen für Roboteranwendungen mithilfe geometrischer Techniken.
Sep 2011 – Sep 2015
Leitete ein staatlich gefördertes Projekt zur Erkennung von Eisenbahndefekten. Erstellte GPU-beschleunigte Algorithmen zur Anomalieerkennung, verteilte Verarbeitungspipelines und multimodale medizinische Bildregistrierung.
Apr 2004 – Apr 2013
ENSCO Rail: Leitete die Bildverarbeitungsgruppe. Entwickelte Echtzeit-Algorithmen für die optische Schienenprofilanalyse und Risserkennung. Verwaltete F&E und die Produktentwicklung der RailScan-Systemfamilie.
Team ENSCO — DARPA Grand Challenge: Baute einen Hindernisdetektor mit Stereokameras, der es einem Roboterfahrzeug ermöglichte, 91 Meilen autonom durch Wüstengelände zu fahren und den sechsten Platz zu belegen.
Sep 2001 – Dez 2003
Entwickelte Frameworks für die Merkmalsextraktion aus Multimedia-Streams, OCR-Auswertung und Klassifizierung unter Verwendung mehrerer Modalitäten.
Erstellte ML-Pipelines zur globalen Extraktion von Straßennamen, Nummern und Verkehrszeichen mittels Erkennung, OCR und semantischer Segmentierung.

Implementierte ein Echtzeitsystem zur Risserkennung an fahrenden Zügen mittels Zeilenkameras, das in Inspektionsflotten integriert wurde.

Entwickelte Module zur 3D-Objekterkennung, Fusion und Vorhersage für L2+/L3-Systeme für autonomes Fahren in Europa und den USA.

Entwarf einen stereo-basierten Hindernisdetektor, der es dem Fahrzeug von Team ENSCO ermöglichte, 91 Meilen autonom zu fahren und den sechsten Platz zu belegen.

Entwarf ein System zur automatischen Inspektion von Eisenbahnkomponenten mittels Deep Learning, mit Risserkennung, Schwellengradierung und Erkennung von fehlenden und/oder gebrochenen Schienenankern.
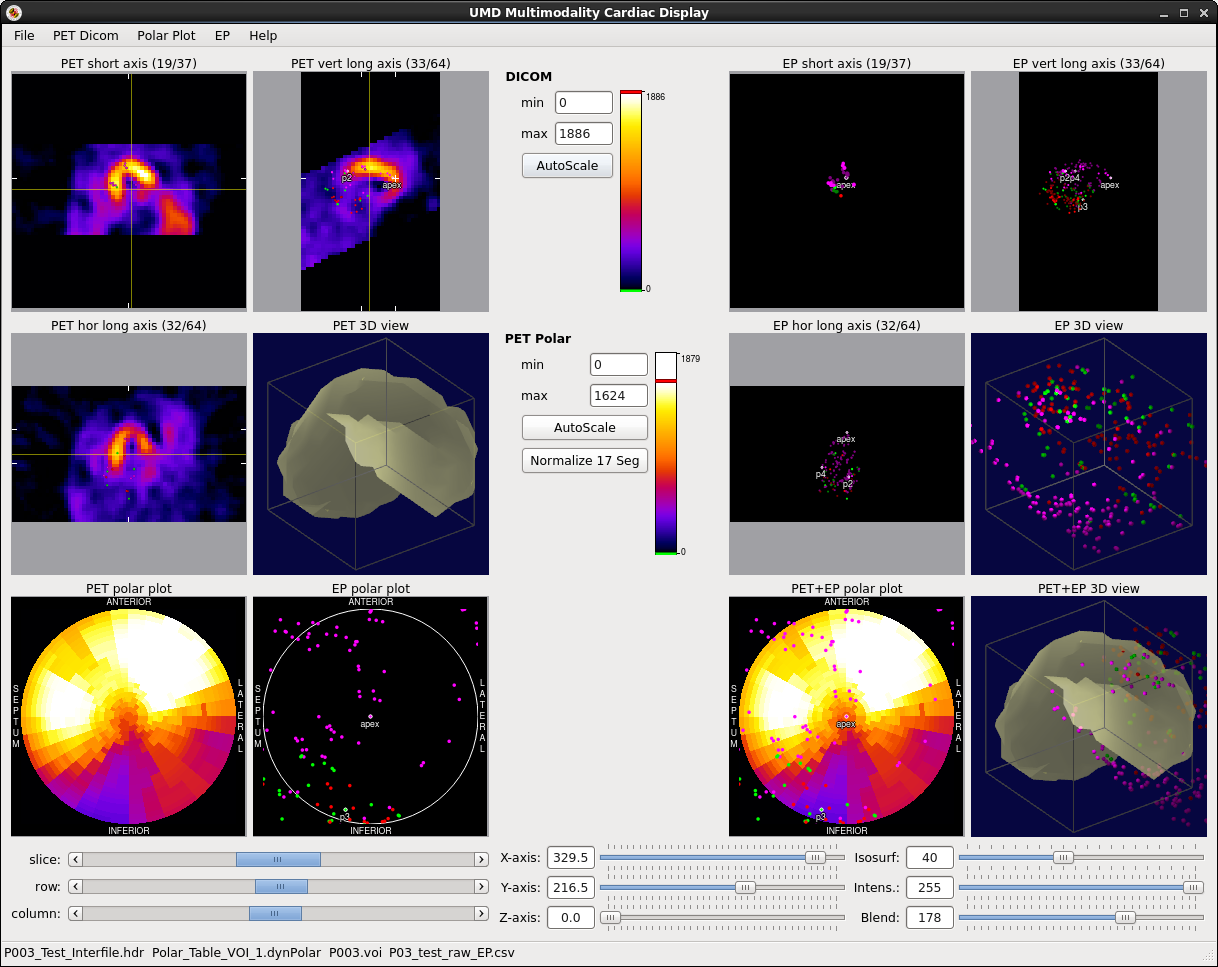
Entwicklung eines multimodalen Herzanzeige- und Analysetools für die medizinische Fakultät der University of Maryland.
 Papier
Papier
Papier
Papier
Papier
Papier
 Code
Papier
Papier
Code
Papier
Code
Papier
Papier
Code
Papier
Interessiert an einer Zusammenarbeit? Vernetze dich auf LinkedIn.