
Extracció de Google Maps Street View
Vaig construir pipelines de ML per extreure noms de carrers, números i senyals de trànsit utilitzant detecció, OCR i segmentació semàntica a escala global.
Sóc un científic investigador amb més de 20 anys d'experiència en visió per computador, aprenentatge profund i sistemes de ML. He treballat en l'acadèmia i la indústria a Google, Momenta, ENSCO i UMD, lliurant solucions impactants des de la concepció fins a la implementació.

Sóc Xavier Gibert-Serra, Doctorat, un consultor especialitzat en aprenentatge automàtic i visió per computador. Anteriorment, vaig ser Enginyer d'R+D a Momenta Europa treballant en percepció per a conducció autònoma, i un Enginyer de Programari d'Aprenentatge Automàtic a Google Maps i Google X Robotics. Abans, a ENSCO, vaig liderar l'R+D de visió per a sistemes d'inspecció ferroviària. Vaig obtenir el meu Doctorat en Enginyeria Elèctrica i Informàtica a la Universitat de Maryland, sota la direcció de Rama Chellappa.
Mai 2023 – Jul 2025
Vaig desenvolupar, entrenar i desplegar actualitzacions del mòdul de percepció de conducció autònoma usat a la UE i als EUA. Centrat en la detecció d'objectes 3D, fusió de múltiples sensors, seguiment, predicció i mineria de dades.
Set 2015 – Abr 2023
Google Maps: Vaig dissenyar pipelines de visió a gran escala per extreure informació estructurada de Street View utilitzant detecció, segmentació, OCR i bundle adjustment.
X Robotics: Vaig desenvolupar algorismes d'estimació de pose i seguiment en temps real per a aplicacions de robòtica utilitzant tècniques geomètriques.
Set 2011 – Set 2015
Vaig gestionar un projecte finançat federalment per a la detecció de defectes en vies ferroviàries. Vaig construir algorismes de detecció d'anomalies accelerats per GPU, pipelines de processament distribuït i registre d'imatges mèdiques multimodals.
Abr 2004 – Abr 2013
ENSCO Rail: Vaig liderar el Grup de Processament d'Imatges. Vaig desenvolupar algorismes en temps real per a l'anàlisi òptica de perfils de rails i la detecció d'esquerdes. Vaig gestionar l'R+D i la productització de la família de sistemes RailScan.
Team ENSCO — DARPA Grand Challenge: Vaig construir un detector d'obstacles utilitzant càmeres estèreo, permetent que un vehicle robòtic conduís de forma autònoma 91 milles pel desert i acabés sisè.
Set 2001 – Des 2003
Vaig desenvolupar marcs per a l'extracció de features de videos multimèdia, avaluació d'OCR i classificació utilitzant múltiples modalitats.
Vaig construir pipelines de ML per extreure noms de carrers, números i senyals de trànsit utilitzant detecció, OCR i segmentació semàntica a escala global.

Vaig desplegar un sistema en temps real per a la detecció d'esquerdes des de trens en moviment, utilitzant càmeres de línia integrades en vehicles d'inspecció en producció.

Vaig desenvolupar mòduls de detecció d'objectes 3D, fusió i predicció per a sistemes de conducció autònoma L2+/L3 a Europa i els EUA.

Vaig dissenyar un detector d'obstacles basat en visió estèreo que va permetre al vehicle de Team ENSCO viatjar 91 milles de forma autònoma i acabar sisè en la general.

Vaig dissenyar un sistema per a la inspecció automàtica de components ferroviaris utilitzant deep learning, amb detecció d'esquerdes, classificació de travesses i detecció d'ancoratges de rail que falten i/o estan trencats.
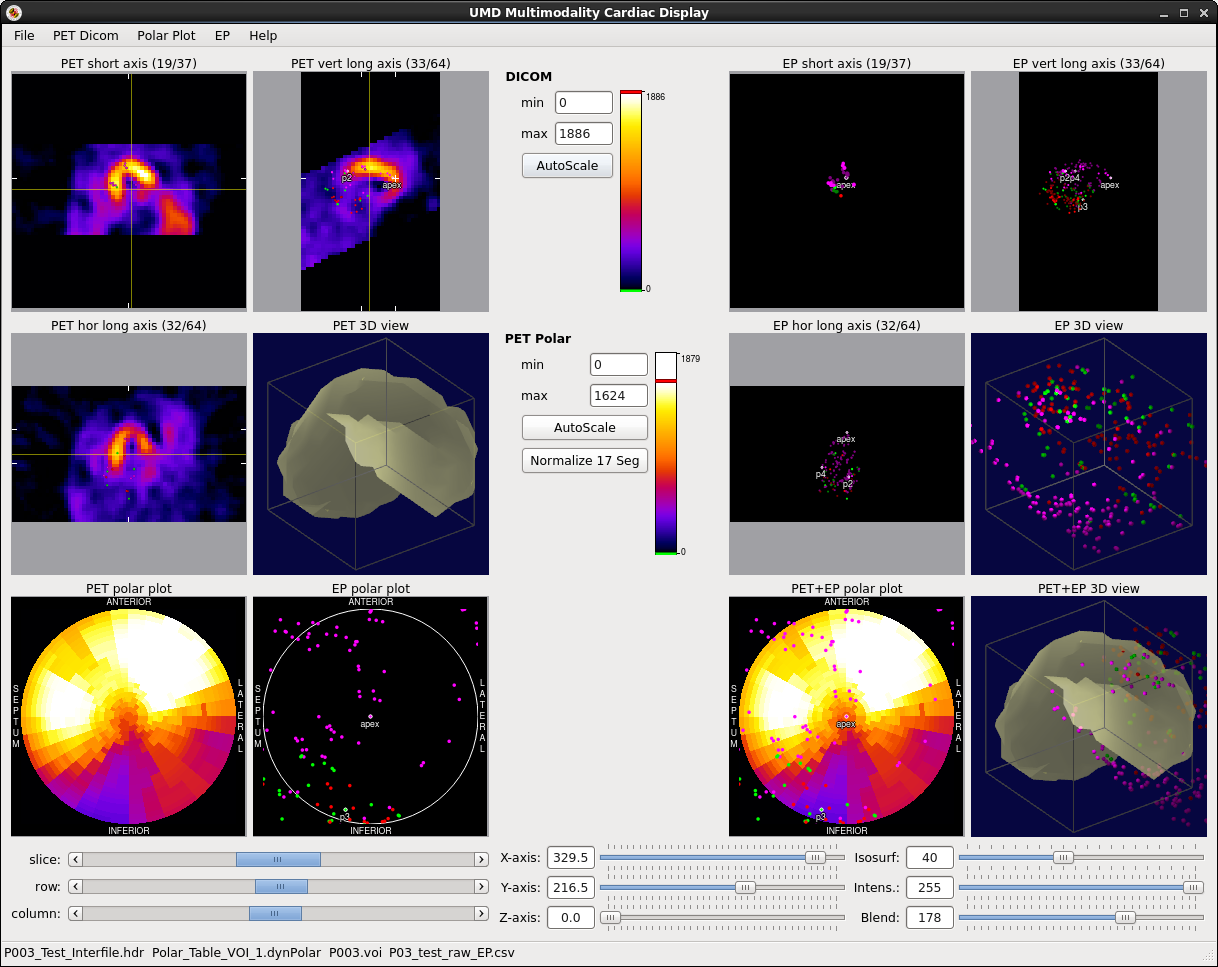
Vaig dissenyar una eina d'anàlisi i visualització cardíaca multimodal per a la facultat de medicina de la Universitat de Maryland.
 Article
Article
Article
Article
Article
Article
 Codi
Article
Article
Codi
Article
Codi
Article
Article
Codi
Article
Interessat en col·laborar? Connecta't per LinkedIn.